标题 Keep your Eyes on the Lane: Real-time Attention-guided Lane Detection 年份: 2020 年 10 月 GB/T 7714: [1] Tabelini L , Berriel R , Paixo T M , et al. Keep your Eyes on the Lane: Real-time Attention-guided Lane Detection[J]. 2020. 1 摘要本文提出了LaneATT:一种基于锚点的深车道检测模型,它与其他一般的深度目标检测器类似,使用锚点进行特征池化操作。由于车道遵循规则模式,且高度相关。全局信息可能对推断它们的位置至关重要,特别是在闭塞、车道标志缺失等情况下。因此,本研究提出了一种新的基于锚点的注意机制,可以聚集全局信息。
主要贡献:
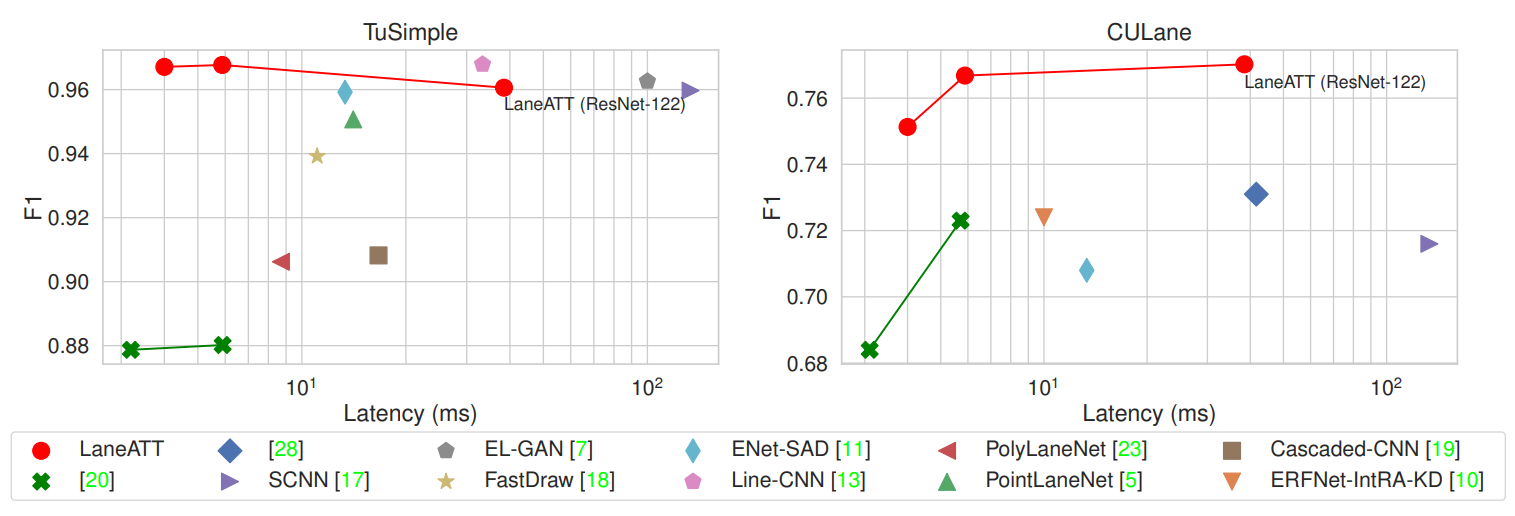
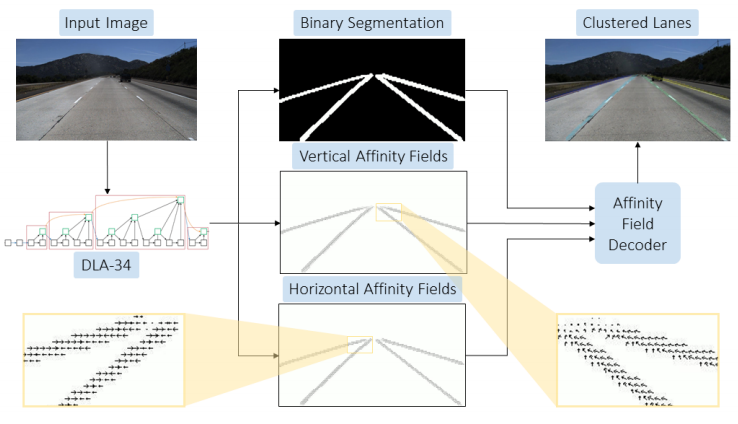
一个SOTA车道线检测方法; 一个更快的训练收敛时间的模型; 一种新的基于锚点的车道检测注意机制。 2 研究方法LaneATT是一个基于锚的单级车道检测模型(比如YOLOv3、SSD),方法框架如图1,输入为一个由前置摄像头拍摄的RGB图$I = \R^{3\times H_I\times W_I}$,输出为车道边界线。主干网络为CNN,生成一个特征映射,然后池提取每个锚的特征。将提取的特征与全局注意力特征相结合,该模型可以更方便地利用其他车道的信息,已解决遮挡问题。最后,将组合特征传递到全连通层,预测最终输出通道。
Overview of the method 主干从输入图像生成特征映射。然后,将每个锚点投影到特征图上。这个投影用于汇集与注意力模块中创建的另一组功能相连接的功能。最后,使用这个结果特征集,两个层,一个用于分类,另一个用于回归,做出最终的预测。
2.1 Lane and anchor representation 车道线点定义:$(X,Y)$
$Y = {y_i}^{N_{}{pts}-1}{i=0}$,其中$y_i = i\cdot \frac{H_I}{N{pts}-1} $;
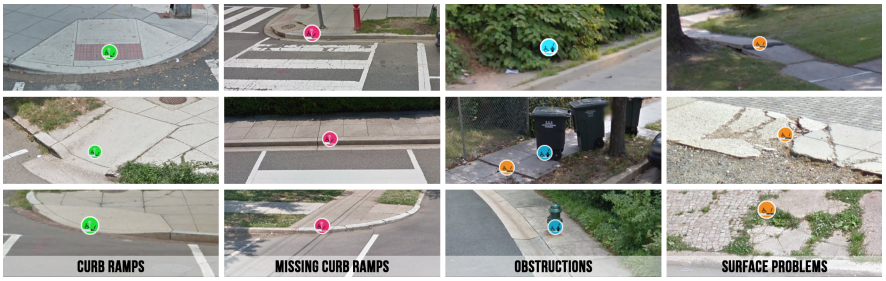
标题 Deep Learning for Automatically Detecting Sidewalk Accessibility Problems Using Streetscape Imagery 年份: 2019 年 10 月 GB/T 7714: [1] Weld G, Jang E, Li A, et al. Deep Learning for Automatically Detecting Sidewalk Accessibility Problems Using Streetscape Imagery[C]. The 21st International ACM SIGACCESS Conference on Computers and Accessibility, 2019: 196–209. 1 概述最近的研究已经应用机器学习方法在在线地图图像(例如卫星照片、街景全景图)中自动查找和/或评估行人基础设施。虽然这些方法可以解决人行道的检测,但它们受到两个相互关联的问题的限制: 小的训练集和机器学习模型的选择。本文借助最近发布的人行道数据集(Project Sidewalk dataset),该数据集包括30多万个基于图像的人行道可达性标签,首次检验了深度学习在谷歌街景(GSV)全景图中的人行道自动评估。
具体来说,有两个应用领域:自动验证众包标签automatically validating crowdsourced labels和自动标记人行道可达性automatically labeling sidewalk accessibility issues问题。对于这两个任务,引入并使用一个经过修改的残差神经网络(ResNet)来支持图像和非图像(上下文)特征(例如地理)。提出了性能分析,非图像特征和训练集大小的影响,以及跨城市泛化。实验结果显著改善了以前的自动化方法,在某些情况下,满足或超过人类标记性能。
人行道应该让所有人受益。它们为在城市中移动提供了安全、环保的管道。对于残疾人来说,人行道可以对他们的独立性、生活质量和整体身体活动产生重大影响。虽然像谷歌和苹果地图这样的地图工具已经开始提供以行人为中心的功能,但它们没有包含人行道路线或人行道可达性的信息,这限制了它们的实用性,并对残疾人产生了特别大的影响。关键的问题是数据从何而来、它是如何收集的?
Research Questions:
R1: 机器学习方法在两个任务(验证和标记)中表现如何? R2: 额外的与图像无关的训练特征对表现有什么影响?