拟合(Fitting)
提取完边缘后如何使用数学模型来描述边缘? 例如:在桌子上有几枚硬币,在经过边缘提取后,需要描述出硬币的圆心坐标和圆的大小
1 难点

- 噪声:噪声的存在使拟合的模型偏离真实的线
- 外点:在目标图形以外的线,如上图中的目标图形为“车”,左边的“栅栏”就是外点
- 目标图形部分被遮挡,使部分图形消失
2 最小二乘(Least Square)
针对点都在线上的一些简单模型
- 最小二乘
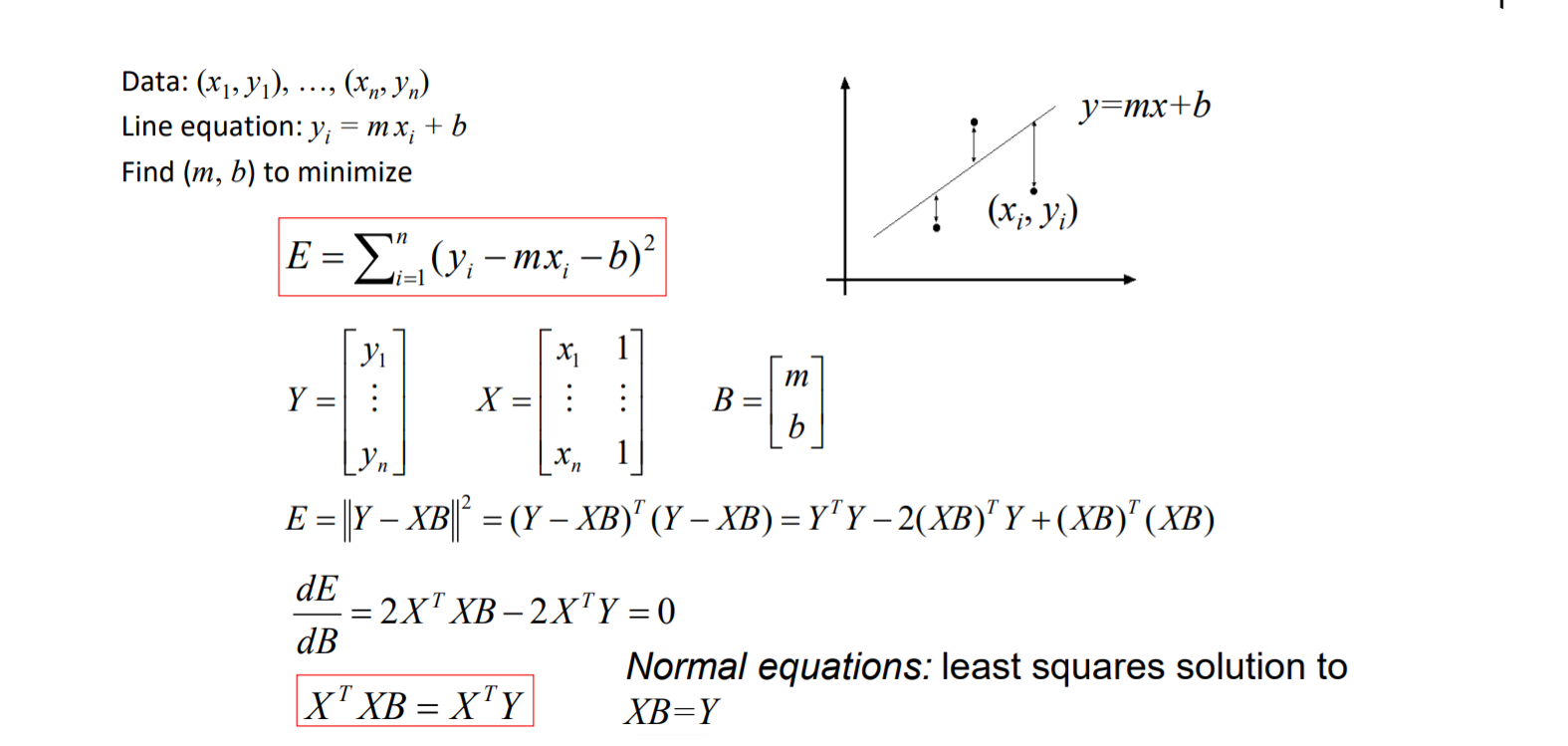
能量函数$E$描述的是所有的点与拟合的线在$y$方向上的差值的和,最后的目标是求出差值最小时的$(m,b)$即矩阵$B$作为这个模型的解
-
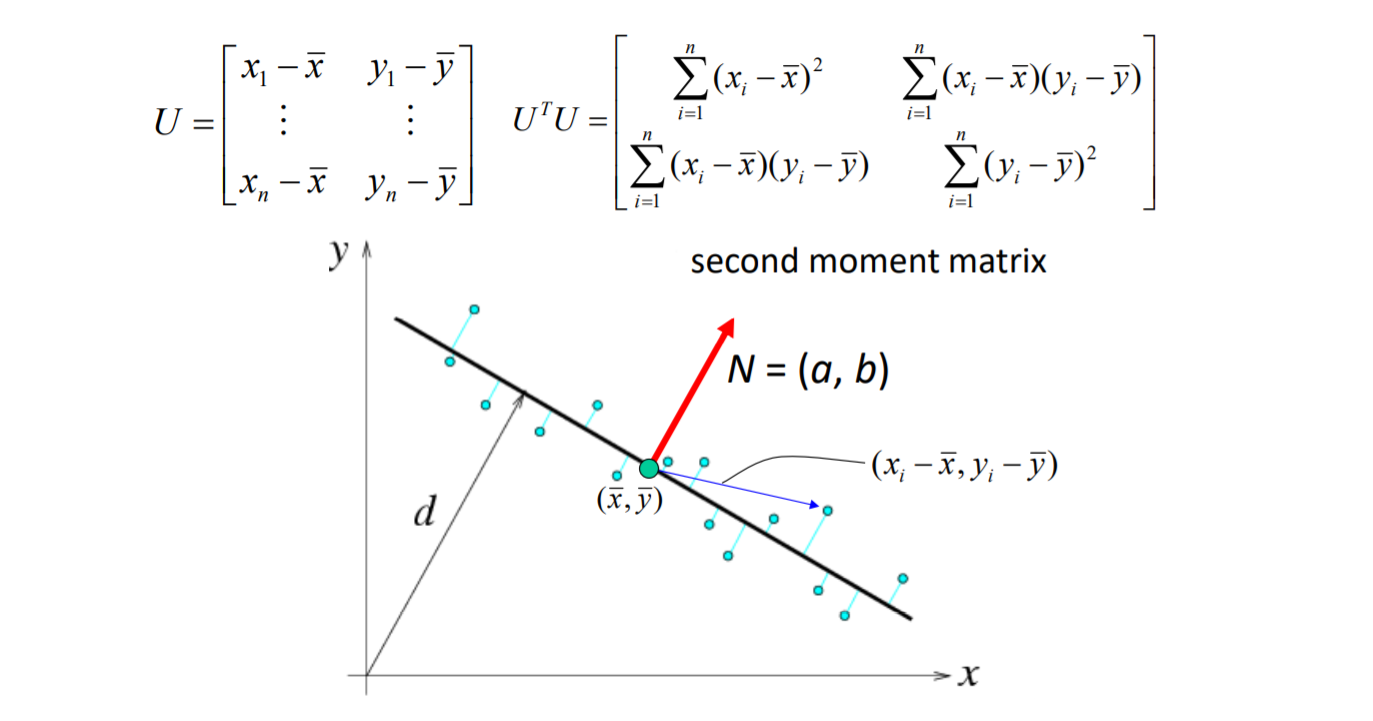
权最小二乘 当拟合的直线是平行$y$轴时就无法按照上面的公式计算$E$(最小二乘对旋转没有效果)
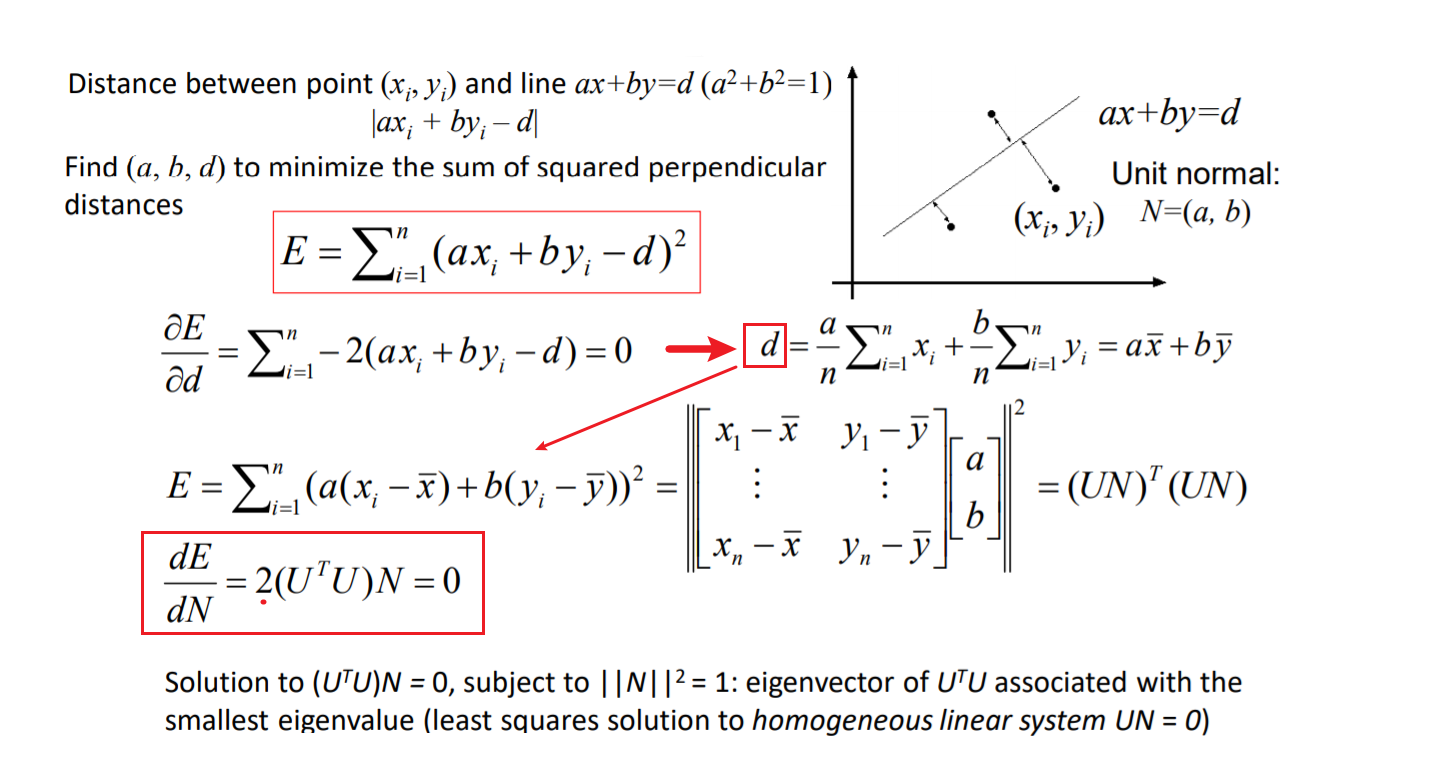
权最小二乘将点在$y$方向的距离改为对直线距离的平方,就可以避免旋转产生的问题 ,它的几何描述就是所有的向量$(x_i-\bar x,y_i-\bar y)$在向量$(a,b)$的投影的值最小
-
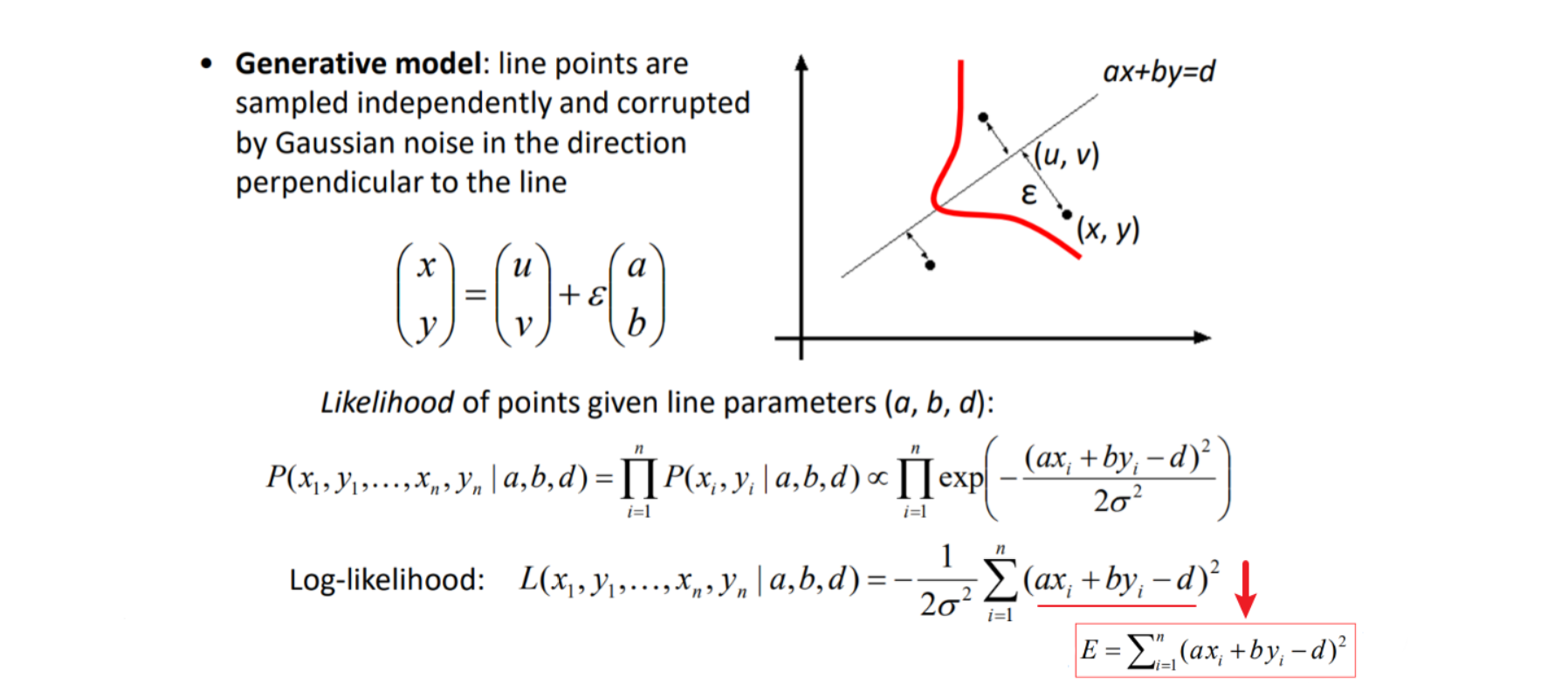
极大似然估计
使用概率分布的思想来理解权最小二乘,概率越大拟合效果越好,极大似然估计,就是利用已知的样本结果信息,反推最具有可能(最大概率)导致这些样本结果出现的模型参数值,它提供了一种给定观察数据来评估模型参数的方法,即:“模型已定,参数未知”。
如果通过极大似然估计,得到模型中参数$\mu$和$\sigma$的值,那么这个模型的均值和方差以及其它所有的信息我们就知道了。
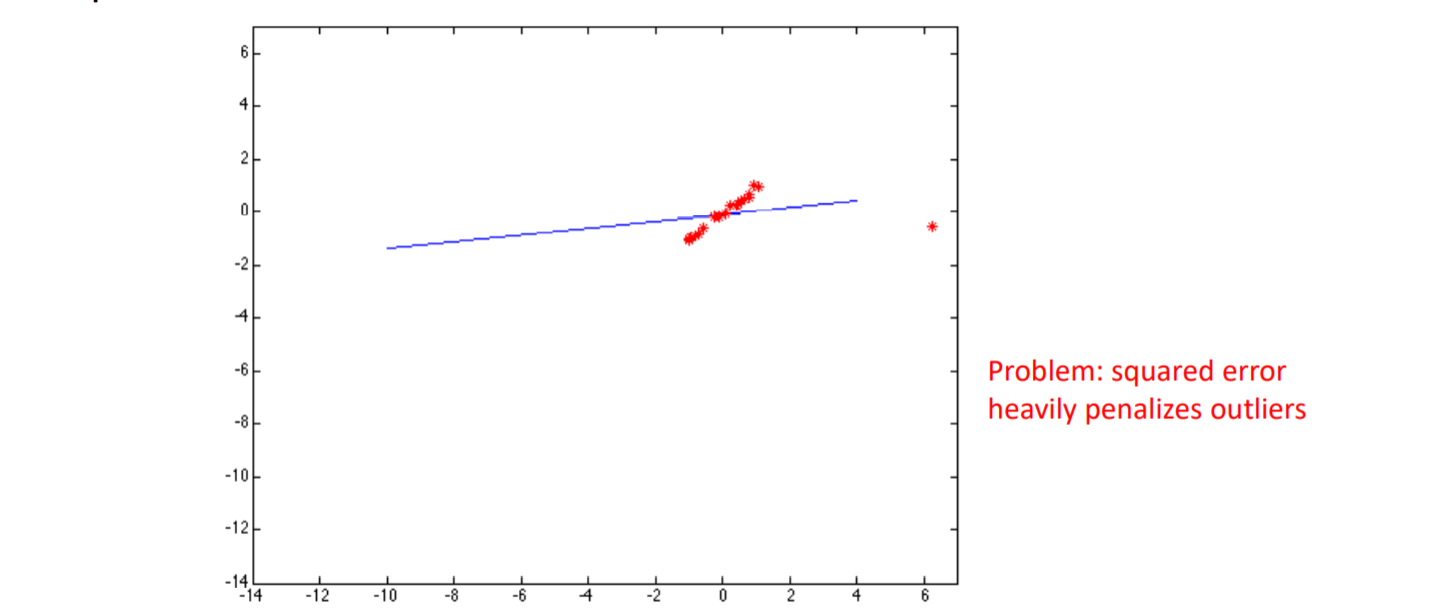
3 Roubst Fitting & RANSAC
当存在外点时,普通的(权)最小二乘就无法很好的拟合模型
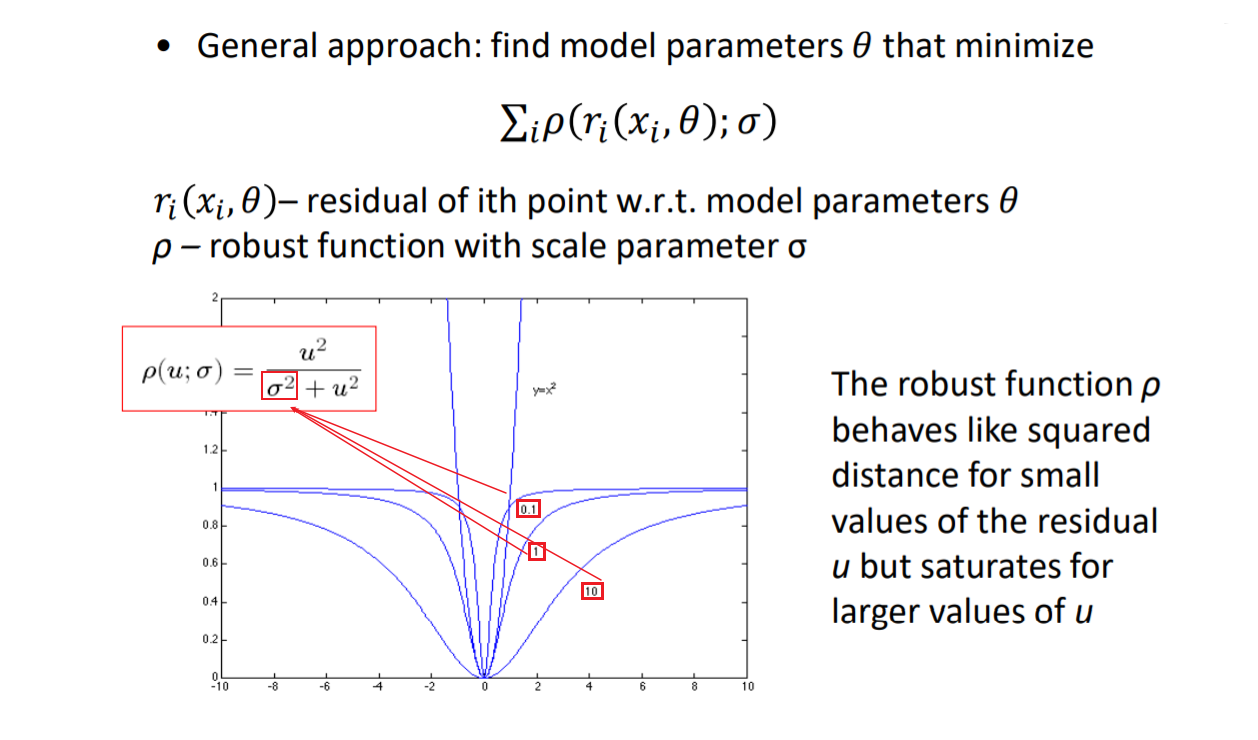
3.1 Roubst fitting(鲁棒拟合)
通过函数$\rho(u;\sigma)$将点到直线的距离$u$在较大的范围时对直线影响的贡献值缩小,$\sigma$为设置的参数,当参数越小对所取的预拟合模型的区域越小,例如当$\sigma=0.1$时,对超过2以后的区域几乎就不做考虑了
- 鲁棒函数估计
- 对于一个非线性的优化问题就不能使用前面的方程求解,需要使用迭代的方式求解类似于梯度下降
- 先不考虑鲁棒拟合的问题,利用最小二乘得到一个初始解
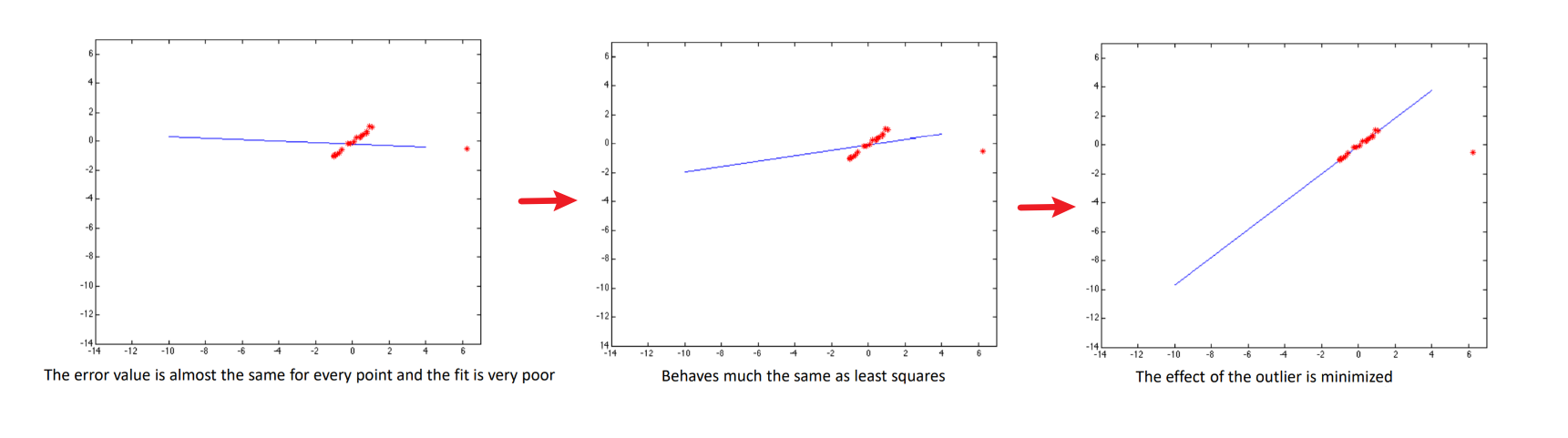
- 根据经验将尺度参数$\sigma$设置成$1.5$倍的平均残差
- 处理后的效果
3.2 RANSAC(随机采样一致性)
当存在许多的点都不在模型上,或者是图片被遮挡,这种时候就需要使用较少的点来拟合出模型
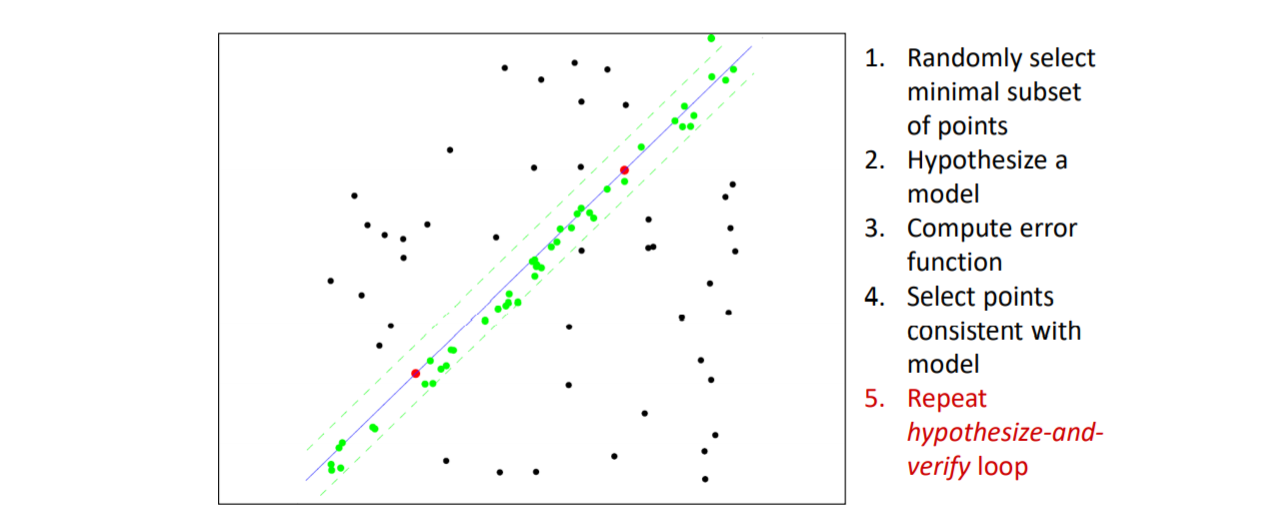
- RANSAC
- 选择一个最小的集合$s$(估计一条直线需要两个点)
- 拟合出一个模型
- 设置一个门限$t$
- 用门限$t$内剩余的点给这个模型“投票”,即“离得近”就 得分
- 重复上述过程,取“得分”最高的模型,设置迭代次数$N$
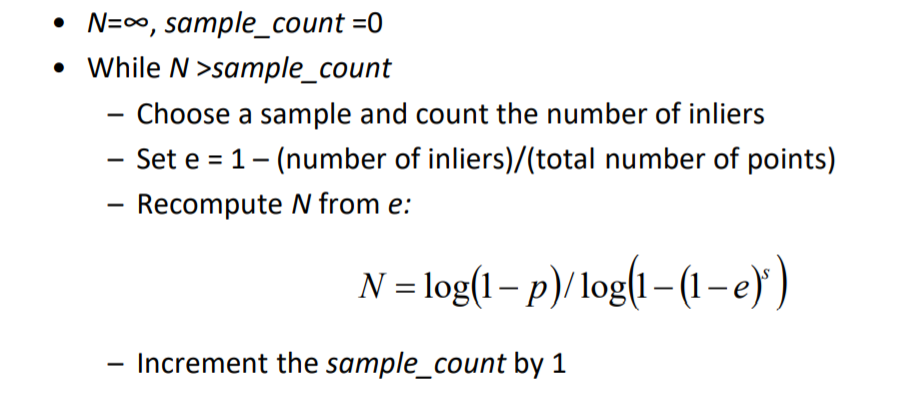
- 选择参数

$e$:外点率,$s$:模型的最小范围,$N$:最大迭代次数,$p$:正确率
-
自适应的参数提取 在实际问题中,只知道参数$t,s$,无法知道外点率$e$也就无法确认迭代次数$N$。 解决方法如下:
-
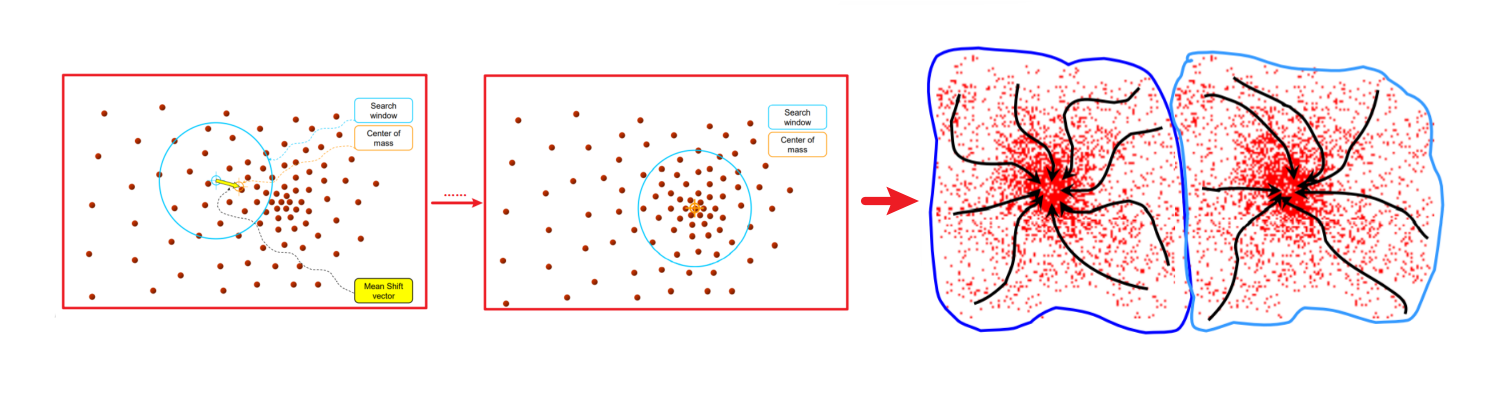
使用RANSAC思想进行指纹识别
4 霍夫变换(Hough Transfrom)
于对存在大量的线的模型,即使设置了较小的门限也无法有效的区分“谁是谁的内点”

主要的改进策略:将点不在是对某一条直线投票,将投票离散化,使图像空间对参数空间进行转换
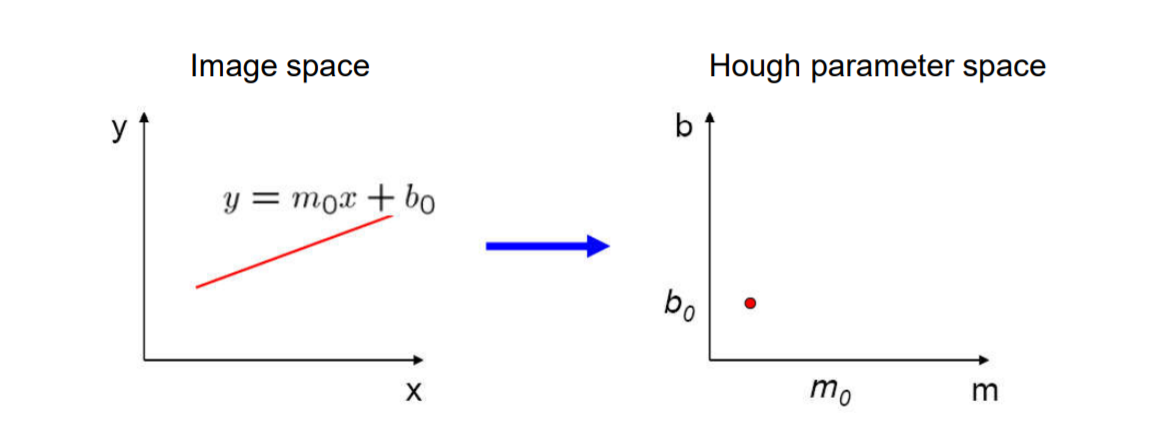
图像空间的一条直线在参数空间是一个点,参数空间多条线的交点是图像空间的边
如果使用直角坐标那么参数范围不好界定,穷举就很困难,例如当图像空间的一条竖直方向的直线,此时$x$取定值,$y$取任意值,在参数空间中就无法表示;在训练过程中也无法给$m,b$划分范围。
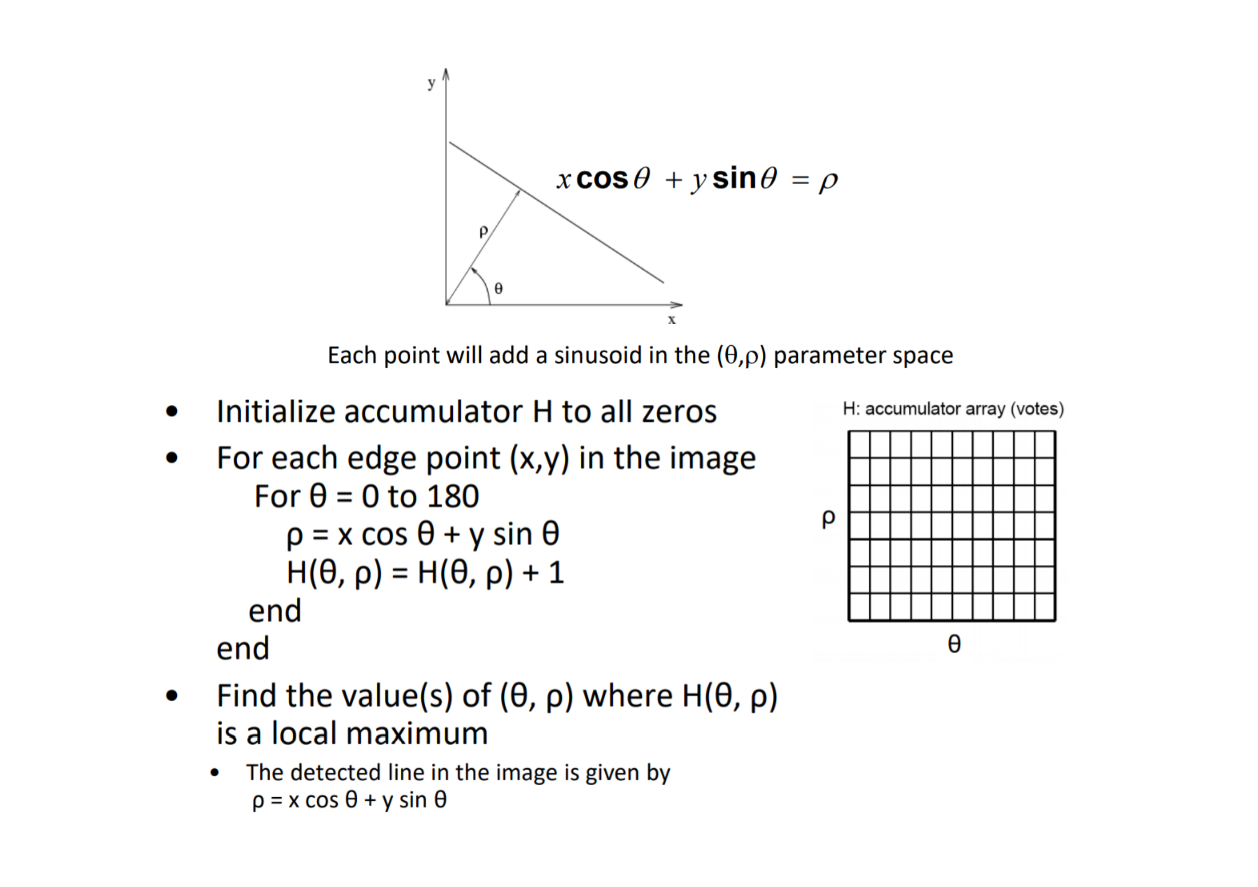
使用极坐标系问题就解决了:极坐标的$\theta$可以取$[0 ,180]$,可以完整的与图像空间对应
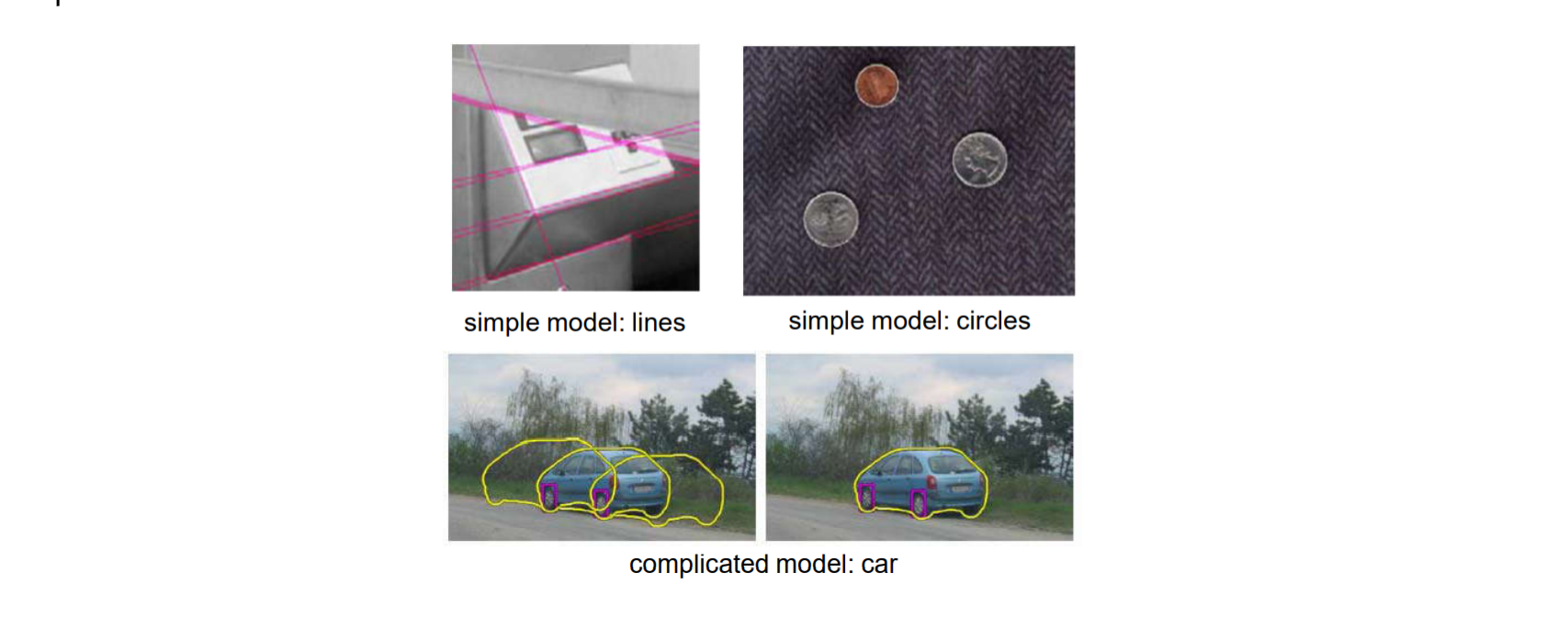
- 一些例子
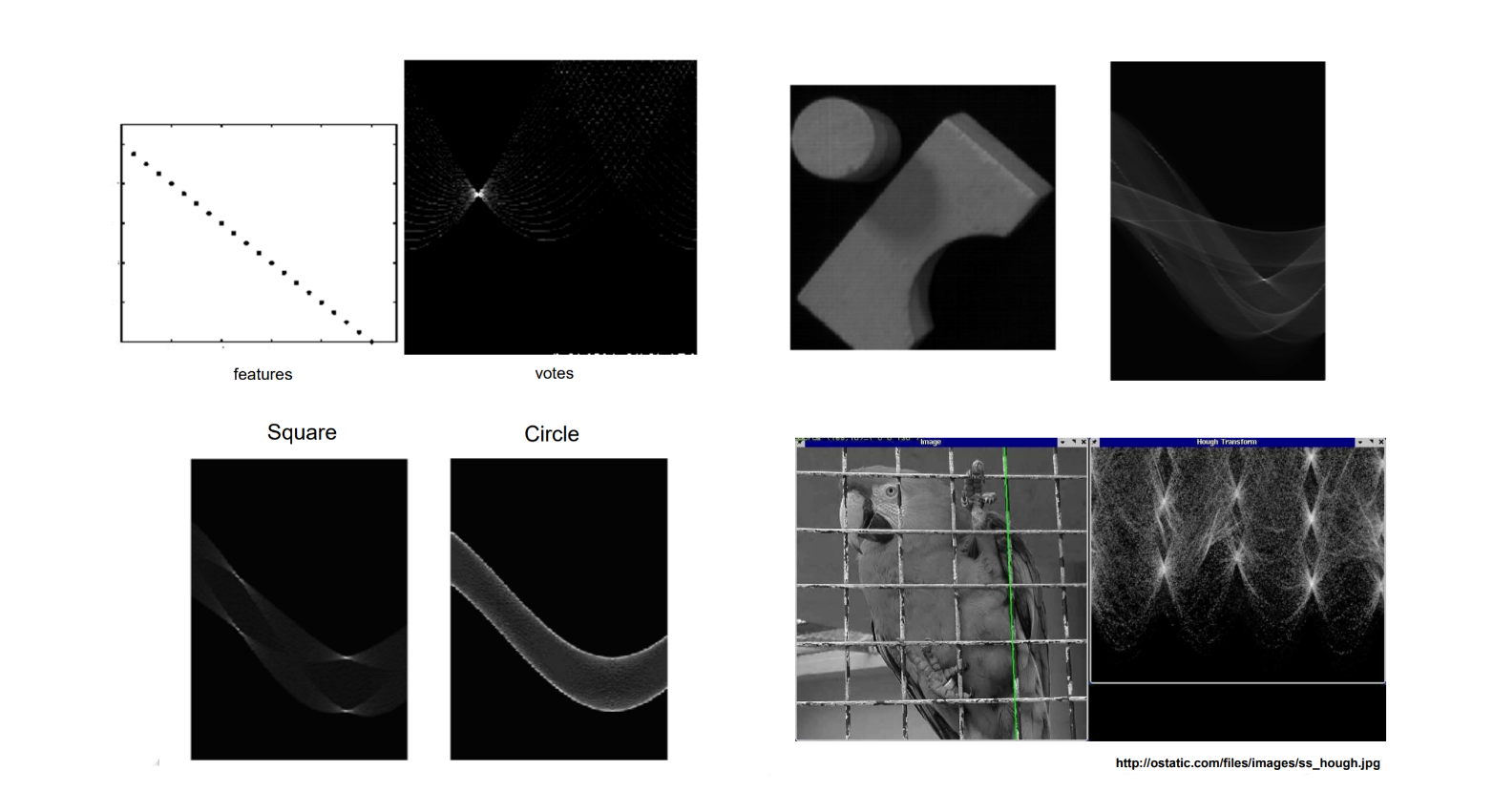
-
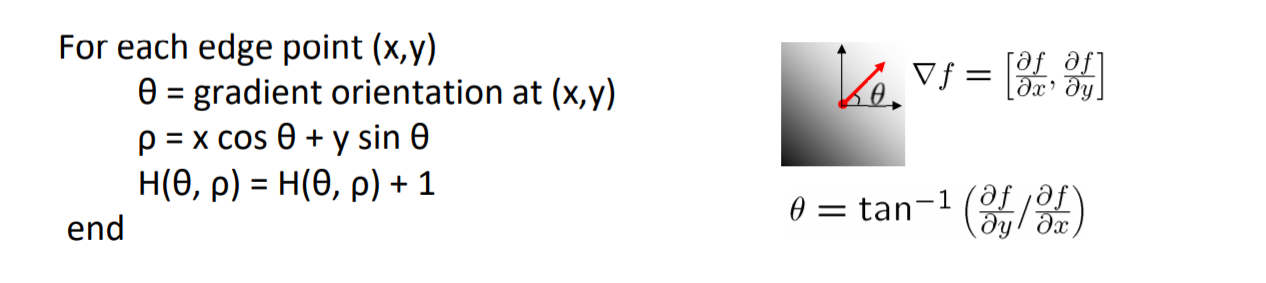
霍夫变换处理噪声
在Candy算子中得到点时就知道了梯度方向,相应的边缘方向的范围就大概确认了,这是就是可以缩小$\theta$的范围,从而解决了噪声的影响,也简化了计算
-
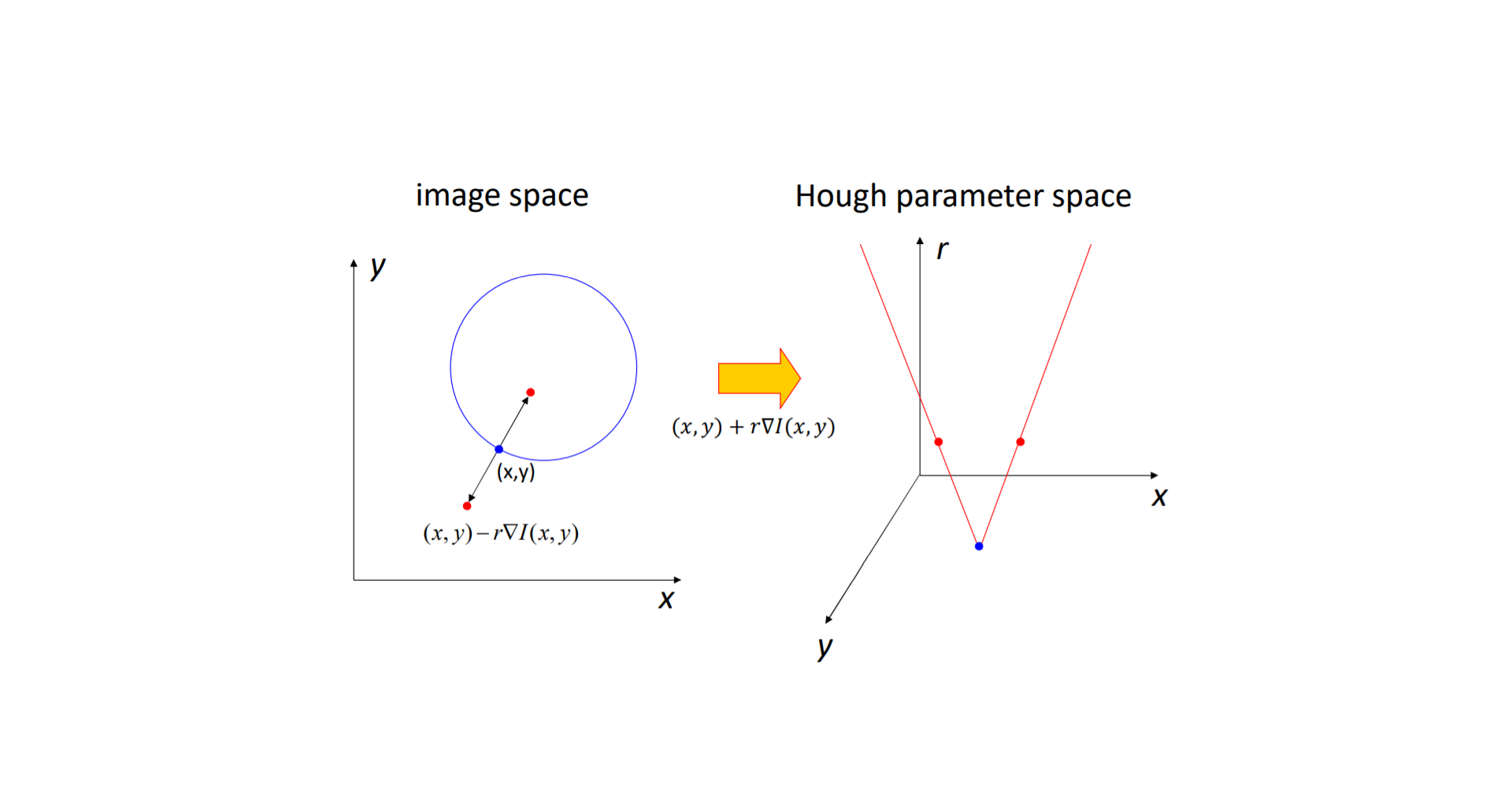
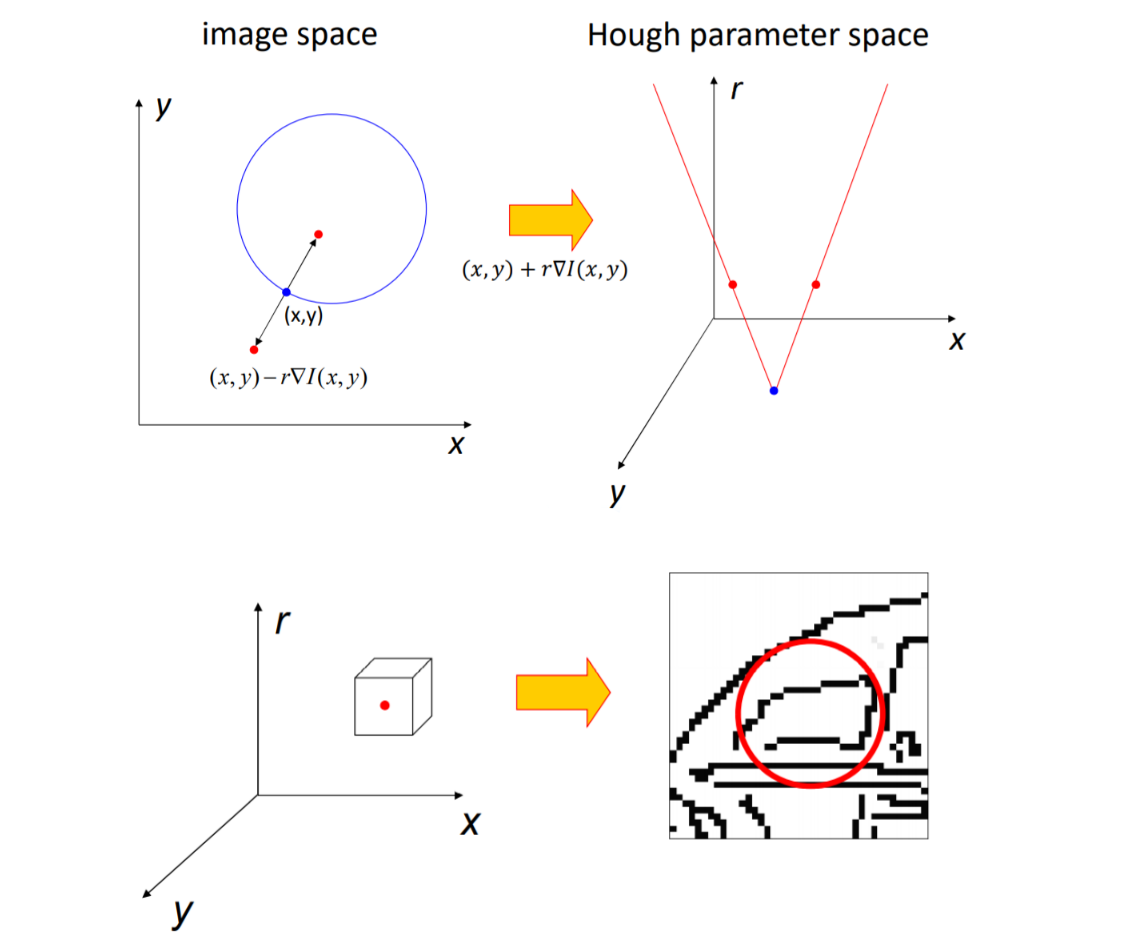
霍夫变换拟合圆
确定一个圆需要圆心坐标$(x, y)$和半径$r$,有三个参数,参数空间就需要是一个三维空间,取圆上的一个点,则可以由梯度方向确定半径方向,穷举所用的$r$(大于0,小于图像长度),遍历圆上的点对$r$进行投票,最后在参数空间会得到一个票数高的三维空间,这个三维空间的中的一点$(x,y,r)$就可以作为拟合的圆心和半径。
学习资源:北京邮电大学计算机视觉——鲁鹏